Morphoses est un projet de recherche-création impliquant des formes de vie artificielle. Il explore la frontière entre le matériel et le comportement à travers les mouvements adaptatifs d’agents robotiques sphéroïdes recouverts de silicone. Les artistes Sofian Audry [cochercheur·euse, UQAM] et Rosalie D. Gagné [collaboratrice] décrivent cette enveloppe comme une « peau », lui conférant des formes irrégulières et variées.
Issu d’une réflexion artistique sur la phénoménologie des systèmes vivants, Morphoses propose une expérience poétique et incarnée de l’apprentissage automatisé, en favorisant une relation affective entre des formes de vie humaines et non humaines.
La création à l’ère de l’apprentissage automatique
Le progrès fulgurant de l’intelligence artificielle, propulsé par les grands modèles d’apprentissage profond, a donné lieu à une « 4e révolution industrielle » (Schwab, 2016) où les systèmes computationnels adaptatifs prennent rapidement en charge des tâches intellectuelles. Au cœur de cette révolution se trouve l’apprentissage automatique, une branche de l’IA qui permet aux machines d’apprendre par elles-mêmes à partir des données du monde réel.
L’apprentissage automatique est de plus en plus mobilisé pour la création artistique, le plus souvent en entraînant des modèles génératifs imposants afin de générer des contenus médiatiques de toutes sortes : texte, image, musique, etc. Cette approche hégémonique présente plusieurs problèmes : elle est énergivore, non respectueuse des droits d’auteurs et tend à une uniformisation de la culture.
Des entités apprenantes
Morphoses s’écarte de cette approche dominante en proposant d’utiliser le processus même d’apprentissage pour générer des comportements au sein d’une installation de vie artificielle.
Inspiré par les tortues artificielles du cybernéticien Grey Walter (Walter, 1950) et par les dessins du naturaliste Ernst Haeckel (Haeckel, 1974), le projet met en scène des agents sphéroïdes autonomes dont les comportements émergent en temps réel grâce à un algorithme d’apprentissage par renforcement. Ces entités reçoivent des récompenses positives ou négatives, visibles par une lueur verte ou rouge, en fonction de leurs actions.
Crédit photo : Léa Martin
Esthétique du comportement adaptatif
Ce projet s’inscrit dans le champ de l’esthétique du comportement (Penny, 1997). Ce domaine émergent des arts numériques utilise les comportements des systèmes artificiels comme matière artistique. Plutôt que de viser l’optimisation ou la performance, Morphoses mobilise le processus d’apprentissage au profit d’une expérience esthétique incarnée. En mettant l’accent sur les comportements adaptatifs et leur potentialité perceptive, sensible et émotionnelle, l’installation interroge les frontières entre humain et non-humain. Comment la forme et la matière influencent-elles le comportement des agents ? Quelles émotions suscitent l’observation d’agents apprenants ?
En explorant les qualités esthétiques spatiales et temporelles des comportements adaptatifs, le projet invite ainsi à repenser la nature de l’intelligence artificielle, non comme une force utilitaire ou menaçante, mais comme un processus fragile, évolutif et poétique, ouvrant de nouvelles voies pour la recherche-création.
Apprentissage par renforcement
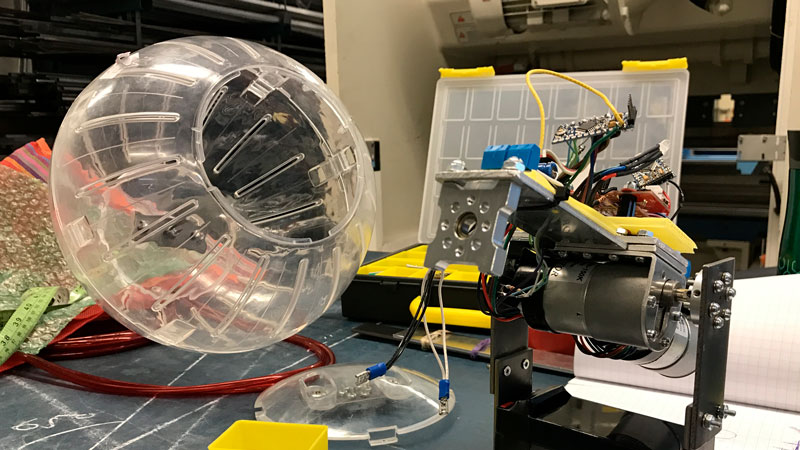
L’œuvre repose sur le déploiement en temps réel de comportements adaptatifs. Les agents robotiques ont été développés de manière itérative, jusqu’à l’obtention de prototypes fonctionnels, répliqués en trois exemplaires.
Ces agents utilisent l’apprentissage par renforcement, une méthode qui permet à un agent artificiel d’apprendre par lui-même à atteindre un objectif (Sutton & Barto, 2018). Par exemple, dans des expériences préliminaires :
Un robot apprenait à s’arrêter.
Initialement, il ne connaissait rien de son environnement et activait ses moteurs de manière aléatoire.
Progressivement, il oscillait, puis finissait par s’immobiliser complètement.
Bien que l’objectif semble simple, le comportement résultant est souvent complexe et imprévisible. Chaque mode comportemental a été développé empiriquement, car les comportements générés ne peuvent pas être anticipés avec précision, même en connaissant les objectifs définis.
Paramétrer et influencer le comportement
Chaque comportement résulte de l’interaction entre différentes composantes. Chaque comportement est créé à partir de trois grandes catégories de contraintes. D’abord, les observations (ou états) de l’agent déterminent l’information à laquelle il a accès afin de prendre ses décisions. Les actions disponibles impactent sa capacité d’agir sur son monde. Finalement, la fonction de récompense détermine le niveau de succès d’une action en réponse à une observation.
Par exemple, pour réaliser le comportement intitulé « Se balancer sans rouler. », les observations sont définies par le mouvement interne ; les actions possibles sont : avancer, reculer, à gauche, à droite ; et les agents sont récompensés positivement lorsqu’ils génèrent un mouvement interne et négativement lorsqu’ils se déplacent horizontalement au sol.
En plus de ces paramètres directement contrôlables par les artistes, au niveau physique, la forme et la matérialité de l’agent (texture, poids, centre de masse, etc.) combinées à son environnement (surface de déplacement, obstacles, frontières de l’espace, etc.) constituent des éléments importants influençant le comportement. Par exemple, un agent aura plus de facilité à réaliser la tâche « Se balancer sans rouler » s’il est collé sur un obstacle ou s’il est plus lourd.
Visualiser et représenter l’apprentissage
Afin de présenter les différents comportements, l’œuvre se déploie sous forme d’une performance d’environ 15 minutes où s’enchaînent les différents comportements de manière séquentielle.
Pour chacun des comportements, un court titre est projeté au mur l’espace de présentation : « Being still », « Moving toward the wall », « Being curious », afin de permettre au visiteur d’interpréter les différents comportements ou intentions des agents.
D’autre part, un écran de visualisation permet de suivre en temps réel le niveau de récompense (positive ou négative) attribué à chaque agent, en fonction de la manière dont les actions posées le rapprochent ou l’éloignent du but visé.
Enfin, à travers la membrane de silicone translucide qui leur sert de peau, on peut deviner les mouvements intérieurs des moteurs et des contrepoids grâce à un système de diodes lumineuses qui émet différentes couleurs oscillantes du rouge au vert en fonction du fait que les actions posées les rapprochent ou les éloignent de leur objectif.
Vidéo et montage : Léa Martin
Réception du public et expositions
Au terme de la période de résidence à l’Institut Milieux, les artistes ont présenté l’œuvre au public restreint. Les réactions furent variées : certaines personnes ne percevaient pas l’apprentissage en tant que tel, alors que d’autres notaient clairement une évolution dans le comportement, en particulier en lien avec la laborieuse dynamique essais-erreur des agents.
L’installation a depuis été présentée en première mondiale au Neuberger Museum of Art (New York, États-Unis), du 18 septembre au 22 décembre 2024, dans le cadre de l’exposition Rosalie D. Gagné : A Contemporary Alchemist. En 2025, elle sera présentée à nouveau au Musée d’art de Joliette (Québec, Canada).
Schwab, K. (2016). The Fourth Industrial Revolution. World Economic Forum.
Sutton, R. S., & Barto, A. G. (2018). Reinforcement learning : An introduction (Second edition). The MIT Press.
Walter, W. G. (1950). An Imitation of Life. Scientific American, 182 (5), 42–45.
Audry, S. (2024). Choreomata. Dans R. A. Trillo & M. Poliks (Éds.), Choreomata : Performance and performativity after AI (First edition, p. 283–307). CRC Press, Taylor & Francis Group.
Artiste et scientifique, Sofian Audry enseigne les médias interactifs à l’École des médias de l’Université du Québec à Montréal (UQAM) et codirige le réseau international Hexagram pour la recherche-création en arts, cultures et technologies.
Son travail explore les comportements d’agents hybrides à la frontière de l’art, de l’intelligence artificielle et de la vie artificielle, à travers des œuvres et des écrits. Son livre Art in the Age of Machine Learning se penche sur les pratiques artistiques de l’apprentissage automatisé (MIT Press, 2021). Ses projets artistiques se déploient à travers de multiples formes telles la robotique, l’installation, le bioart et la littérature électronique.
Rosalie D. Gagné est active dans les arts visuels depuis le début des années 2000. Elle intègre progressivement le numérique à ses œuvres à partir de 2007, après avoir occupé le poste d’assistante de recherche à l’Institut Hexagram (maintenant Institut Milieux) durant ses études de maîtrise à l’Université Concordia, Montréal.
Sa démarche s’enracine dans la phénoménologie de la matière et de la perception. Intéressée à créer des expériences sensorielles et perceptuelles, l’artiste réalise des installations sculpturales immersives et conçoit des environnements réactifs. Elle y reflète les rapports entre le macrocosme et les microcosmes ainsi que les tensions et les rapprochements possibles entre nature et technologie.
Ayant présenté son travail au Canada, aux États-Unis, au Mexique et en Europe, Rosalie D. Gagné vit à Tiohtiá:ke/Mooniyang/Montréal et partage son temps entre sa pratique artistique et l’enseignement des arts visuels.