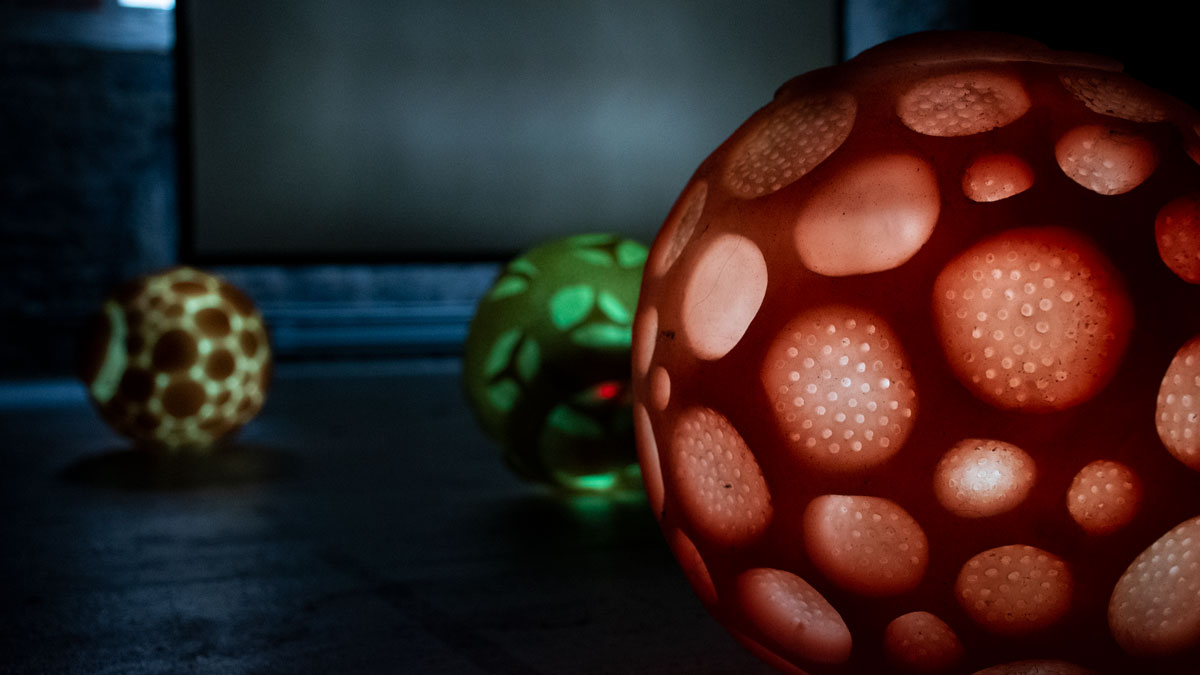
Morphoses is a research-creation project involving artificial life forms. It explores the boundary between material and behaviour, through the adaptive movements of spheroid robotic agents covered in silicone. Artists Sofian Audry and Rosalie D. Gagné describe this envelope as a “skin,” giving it irregular and varied shapes.
Emerging from an artistic reflection on the phenomenology of living systems, Morphoses offers a poetic and embodied experience of automated learning, fostering an affective relationship between human and non-human life forms.
The rapid progress of artificial intelligence, driven by large deep learning models, has led to a “4th Industrial Revolution” (Schwab, 2016) where adaptive computational systems are quickly taking over intellectual tasks. At the heart of this revolution is machine learning, a branch of AI that allows machines to learn on their own from real-world data.
Machine learning is increasingly being used for artistic creation, often by training strong generative models to produce various types of media content: text, images, music, etc. This hegemonic approach presents several problems: it is energy-intensive, does not respect copyright, and tends to homogenize culture.
Learning Entities
Morphoses deviates from this dominant approach by using the learning process itself to generate behaviours within an artificial life installation.
Inspired by the artificial turtles of cybernetician Grey Walter (Walter, 1950) and the drawings of naturalist Ernst Haeckel (Haeckel, 1974), the project features autonomous spheroid agents whose behaviours emerge in real-time thanks to a reinforcement learning algorithm. These entities receive positive or negative rewards, visible by a green or red glow, based on their actions.
Photo credit: Léa Martin
Aesthetics of Adaptive Behaviour
This project falls within the field of behaviour aesthetics (Penny, 1997). This emerging domain of digital arts uses the behaviours of artificial systems as artistic material. Rather than aiming for optimization or performance, Morphoses leverages the learning process for an embodied aesthetic experience. By focusing on adaptive behaviours and their perceptual, sensitive, and emotional potential, the installation questions the boundaries between human and non-human. How do form and matter influence the behaviour of agents? What emotions are evoked by observing learning agents?
By exploring the spatial and temporal aesthetic qualities of adaptive behaviours, the project invites us to rethink the nature of artificial intelligence, not as a utilitarian or threatening force, but as a fragile, evolving, and poetic process, opening new avenues for research-creation.
Reinforcement Learning
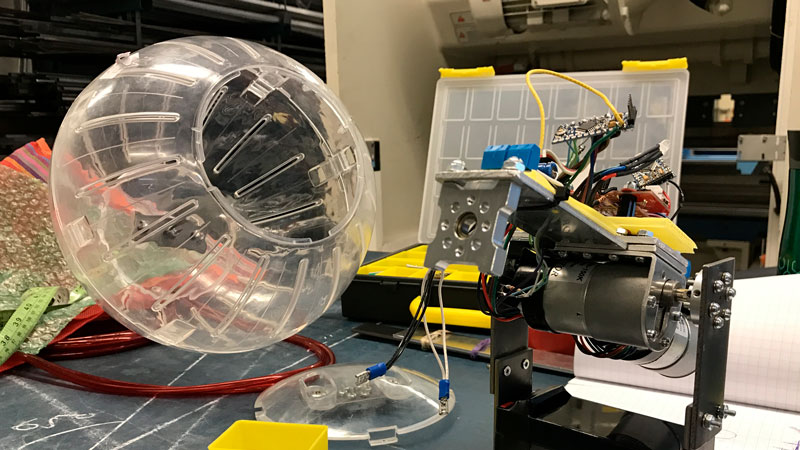
The work relies on the real-time deployment of adaptive behaviours. The robotic agents were developed iteratively until functional prototypes were obtained, replicated in three copies.
These agents use reinforcement learning, a method that allows an artificial agent to learn on its own to achieve a goal (Sutton & Barto, 2018). For example, in preliminary experiments:
A robot learned to stop.
Initially, it knew nothing about its environment and activated its motors randomly.
Gradually, it oscillated and eventually came to a complete stop.
Although the goal seems simple, the resulting behaviour is often complex and unpredictable. Each behavioural mode was developed empirically, as the generated behaviours cannot be precisely anticipated, even when the defined goals are known.
Configuring and Influencing Behaviour
Each behaviour results from the interaction between different components. Each behaviour is created from three main categories of constraints. First, the agent’s observations (or states) determine the information it has access to for making decisions. The available actions impact its ability to act on its world. Finally, the reward function determines the success level of an action in response to an observation.
For example, to achieve the behaviour titled “Swinging without Rolling,” the observations are defined by internal movement; the possible actions are move forward, backward, left, right; and the agents are rewarded positively when they generate internal movement and negatively when they move horizontally on the ground.
In addition to these parameters directly controllable by the artists, at the physical level, the form and materiality of the agent (texture, weight, centre of mass, etc.) combined with its environment (movement surface, obstacles, space boundaries, etc.) are important elements influencing behaviour. For example, an agent will find it easier to perform the task “Swinging without Rolling” if it is stuck to an obstacle or if it is heavier.
Visualization and Representation of Machine Learning
To present the different behaviours, the work unfolds as a performance of about 15 minutes, where the various behaviours follow one another sequentially.
For each behaviour, a short title is projected on the wall of the presentation space: “Being still,” “Moving toward the wall,” “Being curious,” to allow visitors to interpret the different behaviours or intentions of the agents.
Additionally, a visualization screen allows real-time tracking of the reward level (positive or negative) assigned to each agent, based on how their actions bring them closer to or further from the intended goal.
Finally, through the translucent silicone membrane that serves as their skin, the internal movements of the motors and counterweights can be discerned thanks to a system of light-emitting diodes that display different oscillating colours from red to green, depending on whether the actions taken bring them closer to or further from their objective.
Vidéo et montage : Léa Martin
Public Reception and Exhibitions
At the end of the residency period at the Milieux Institute, the artists presented the work to a limited audience. Reactions varied: some people did not perceive the learning process itself, while others clearly noted evolution in behaviour, particularly related to the laborious trial-and-error dynamics of the agents.
The installation has since been presented in its world premiere at the Neuberger Museum of Art (New York, United States), from September 18 to December 22, 2024, as part of the exhibition Rosalie D. Gagné: A Contemporary Alchemist. In 2025, it will be presented again at the Musée de Joliette (Québec, Canada).
Schwab, K. (2016). The Fourth Industrial Revolution. World Economic Forum.
Sutton, R. S., & Barto, A. G. (2018). Reinforcement learning : An introduction (Second edition). The MIT Press.
Walter, W. G. (1950). An Imitation of Life. Scientific American, 182 (5), 42–45.
Audry, S. (2024). Choreomata. Dans R. A. Trillo & M. Poliks (Éds.), Choreomata : Performance and performativity after AI (First edition, p. 283–307). CRC Press, Taylor & Francis Group.
Artist and Scientist, Sofian Audry teaches interactive media at the School of Media at the University of Quebec in Montreal (UQAM) and co-directs the international Hexagram Network for research-creation in arts, cultures, and technologies.
Their work explores the behaviours of hybrid agents at the intersection of art, artificial intelligence, and artificial life, through artworks and writings. Their book Art in the Age of Machine Learning examines the artistic practices of automated learning (MIT Press, 2021). Their artistic projects span multiple forms such as robotic, installation, bioart, and electronic literature.
Rosalie D. Gagné has been active in the visual arts since the early 2000s. She gradually integrated digital elements into her works starting in 2007, after serving as a research assistant at the Hexagram Institute (now Milieux Institute) during her master’s studies at Concordia University, Montreal.
Her approach is rooted in the phenomenology of matter and perception. Interested in creating sensory and perceptual experiences, the artist creates immersive sculptural installations and designs reactive environments. Her work reflects the relationships between the macrocosm and microcosms, as well as the possible tensions and connections between nature and technology.
Having presented her work in Canada, the United States, Mexico, and Europe, Rosalie D. Gagné lives in Tiohtiá:ke/Mooniyang/Montreal and divides her time between her artistic practice and teaching visual arts.